A .gov website belongs to an official government organization in the United States.
Secure .gov websites use HTTPS
A lock () or https:// means you've safely connected to the .gov website. Share sensitive information only on official, secure websites.
Atmospheric Remote Sensing: Instruments
FLOE Instrumentation
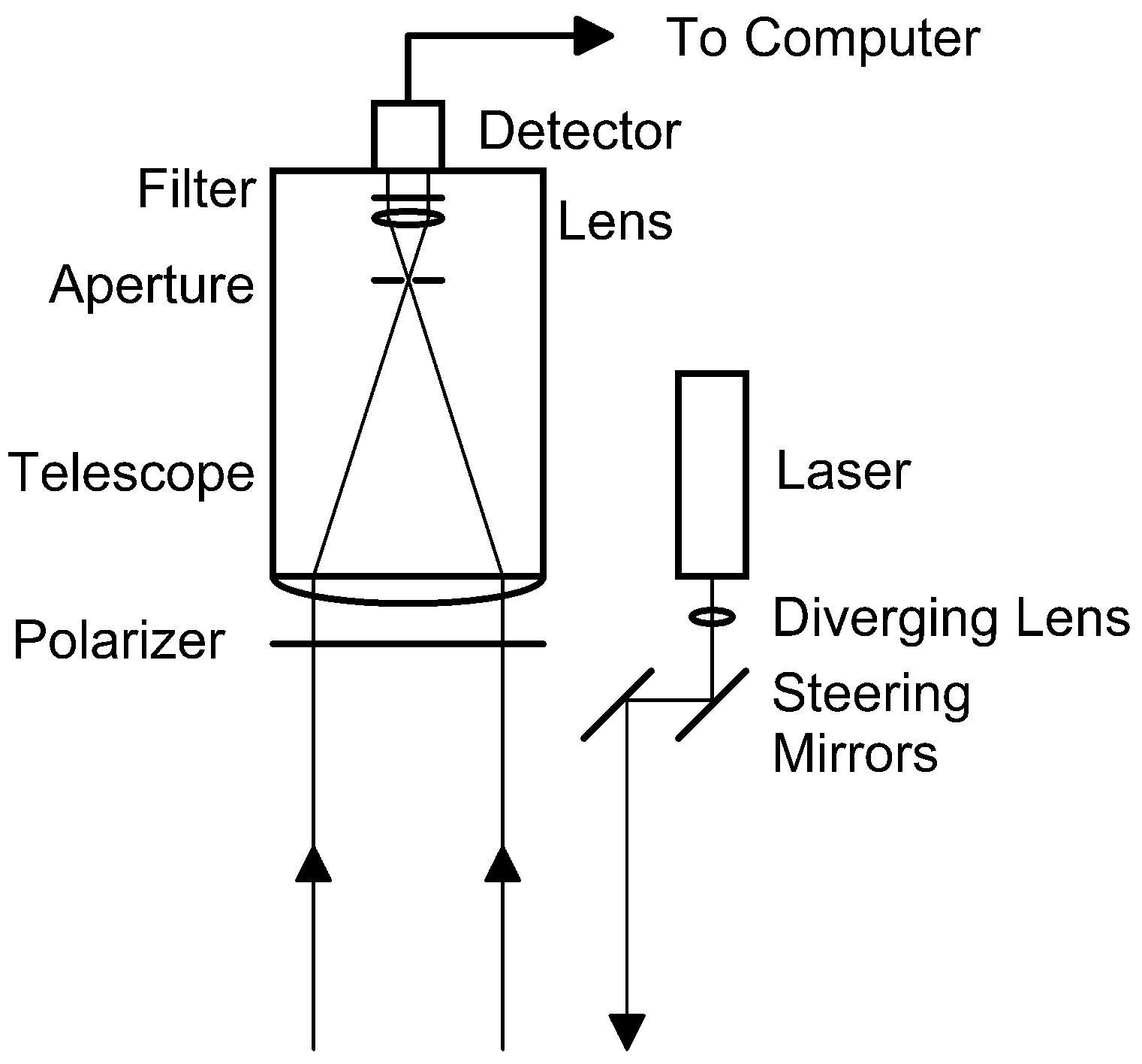
In this LIDAR, a laser emits a short pulse (~12 ns) of polarized green (532 nm) light toward the ocean surface. Some of the light is reflected from the surface and some continues down to be reflected back from a school of fish. Two telescopes are pointed in the same direction as the laser and collect the reflected light. Each telescope is a simple refractor that uses a condenser lens as the primary element. A film polarizer on the front of each telescope selects either the light co-polarized or cross-polarized with respect to the transmitter. The detector is a photomultiplier tube, which is followed by a logarithmic amplifier to compress the dynamic range of the signal. The signal is routed to an 8-bit analog-to-digital converter (ADC) in a personal computer where it is digitized and saved to the hard disk, along with ancillary information.
Specifications
TRANSMITTER
Wavelength
532 nm
Pulse length
12 nsec
Pulse energy
100 mJ
Pulse repetition rate
30 Hz
Beam divergence
17 mrad
RECEIVER
Aperture diameter
5 - 15 cm
Field of view
17 mrad
Optical bandwidth
1 nm
Sample rate
1 GHz
Polarization
linear, co and X
Other instruments that have flown along with the LIDAR include video and still cameras in the visible and infrared, visible radiometers to measure ocean color at six wavelengths, and an infrared radiometer to measure sea-surface temperature.
Block diagram of the LIDAR transmitter and one of two receiver channels.
Processing of the lidar data is important to obtain useful information. The lidar signal from any depth depends on both the backscattering at the depth and the attenuation from the surface to that depth. One way to separate the effects of these parameters is to find a relationship between them (Churnside et al., 2014). Another approach uses a perturbation approach that uses a regression to obtain the baseline values and measures perturbations against that baseline (Churnside et al., 2018; Churnside and Marchbanks, 2017).